Mechanical Engineering undergraduated school project
Mechanical system control -project (2019-2)
(a) H-bridge test (forward & backward)
(b) PID control (motor control)
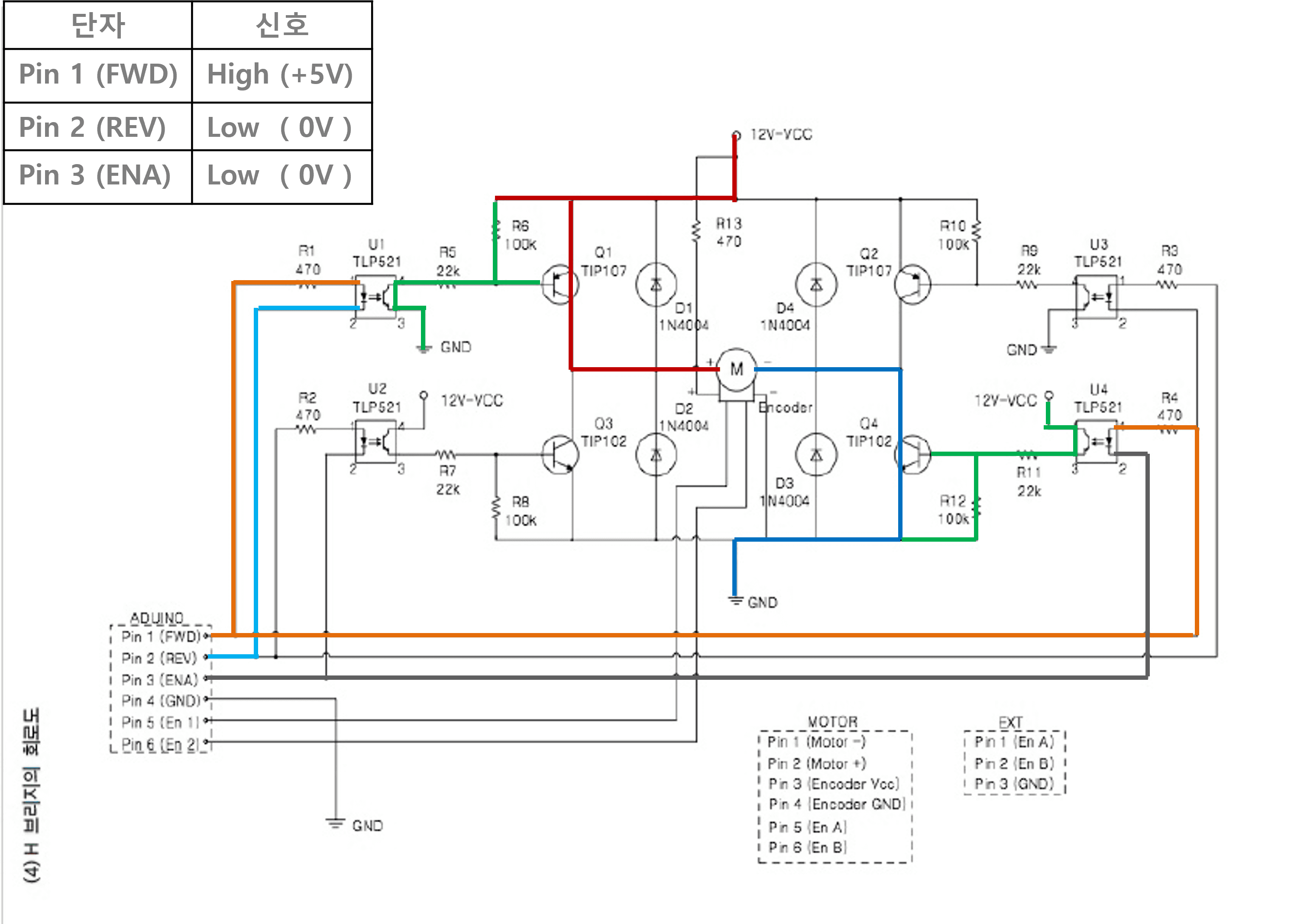
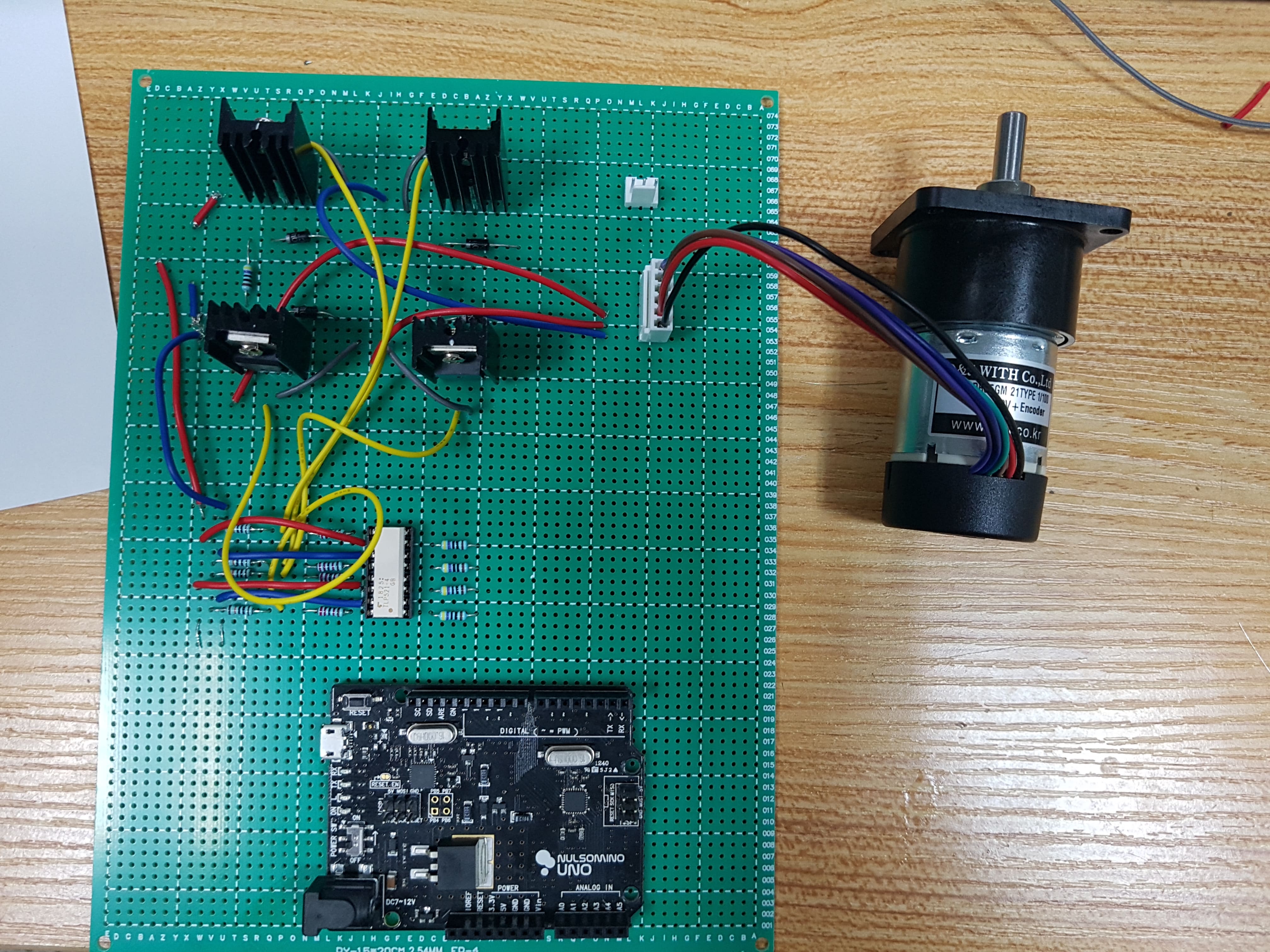
(c) H-bridge circuit & Complete controller
Description: A project to evaluate how accurately a motor follows an arbitrary velocity profile and how quickly it responds. The H-bridge was made by referring to the circuit diagram using wires and transistors on the PCB board. And PID control was implemented by loading the code on Arduino. In the process of soldering and making it myself considering the current and voltage of the circuit, I was able to broaden my understanding of circuit diagrams as well as the uses of circuit components.